ХӘ ТӘЈә ұҫОДФЪЧЫәПјёЦЦҙ«НіөДПЯХуCCDЗэ¶ҜКұРтІъЙъ·Ҫ·ЁУЕЎўИұөгөД»щҙЎЙПЈ¬МбіцБЛТ»ЦЦ»щУЪөҘЖ¬»ъөДРВРНПЯХуCCDЗэ¶ҜөзВ·Ј¬ҪбәПТ»ҝоіЈУГРҫЖ¬TCD1500CЈ¬ПкПёҪйЙЬБЛёГ·Ҫ·ЁөДҫЯМеКөПЦЎЈ
ТэСФ
І»Н¬і§јТЎўІ»Н¬РНәЕөДCCDөДЗэ¶ҜКұРтКЗІ»Н¬өДЈ¬јУЦ®¶ФІ»Н¬РФДЬЎўІ»Н¬УҰУГіЎәПөДМе»эЎўіЙұҫЎўБй»оРФТӘЗуІ»Н¬Ј¬УЪКЗІъЙъБЛЦЪ¶аөДЗэ¶ҜКұРтөДІъЙъ·Ҫ·ЁЈ¬ЦчТӘУРЦұҪУКэЧЦөзВ·Зэ¶ҜЎўөҘЖ¬»ъҝЪЗэ¶ҜЎўEPROMЗэ¶ҜЎўЧЁУГICЗэ¶ҜөИіЈУГөДЗэ¶ҜКұРтөДІъЙъ·Ҫ·ЁЎЈө«КЗЛьГЗҙжФЪЧЕВЯјӯЙијЖҪПОӘёҙФУЎўөчКФА§ДСЎўИбРФҪПІоЎўЗэ¶ҜКұЦУөНөИИұөгЎЈ
ұҫОДФЪЧЫәПёчЦЦЗэ¶ҜКұРт·Ҫ·ЁөД»щҙЎЙПЈ¬МбіцБЛөДТ»ЦЦ»щУЪөҘЖ¬»ъөДРВРНЗэ¶ҜөзВ·ЎЈёГөзВ·К№УГ¶АБўөДКұЦУФҙІъЙъҫ«И·өДКұЦУВціеЈ¬ІЙУГҝЙұаіМ¶ЁКұјЖКэРҫЖ¬әНөҘЖ¬»ъҝШЦЖПаҪбәПөД·Ҫ·ЁЈ¬К№өзВ·ІъЙъОИ¶ЁЎўҫ«И·ЎўёЯЛЩөДЗэ¶ҜВціеЈ¬ёГөзВ·Ҫб№№јтөҘЎўөчКФ·ҪұгЎўCPUХјУГВКөНЈ¬ҪөөНБЛПөНіөДЧЬМеіЙұҫЈ¬¶шЗТҫЯУРБјәГөДИбРФЈ¬Ц»РиТӘёДұдЗэ¶ҜИнјюҫНҝЙТФУҰУГУЪІ»Н¬өДCCDРҫЖ¬Ј¬ёьККәПУЪ№ӨТөІвБҝУГНҫЎЈ
Зэ¶ҜөзВ·»щұҫЧйіЙ
»щУЪөҘЖ¬»ъөДРВРНПЯХуCCDЗэ¶ҜөзВ·ЦчТӘУЙВціе·ўЙъөзВ·Ўў·ЦЖөөзВ·ЎўҝШЦЖөзВ·ЎўВцҝнөчЦЖөзВ·өИЧйіЙЈ¬ИзНј1ЛщКҫЎЈ
НЁіЈКұЦУВціеҝЙИЎЧФТФПВНҫҫ¶ЈәөҘЖ¬»ъXTAL¶ЛЎўALE¶ЛЎў¶АБўВціеФҙЎЈЖдЦРИЎЧФXTAL¶ЛКұЈ¬ҫӯ·ЦЖөөзВ·өГөҪөДВціеЖөВККЬПЮЦЖЈ»ИЎЧФALE¶ЛөДВціеФЪөҘЖ¬»ъ·ГОКНвІҝҙжҙўЖчөДКұәт¶ӘК§Ј¬ҫ«¶ИКЬУ°ПмЈ»¶шИЎЧФ¶АБўВціеФҙөДВціеТтЖд¶АБўРФ¶шҫ«¶ИҪПёЯЈ¬ЗТЛщІъЙъөДВціеЖөВКҝЙЧФУЙСЎФсЈ¬ОИ¶ЁРФәГЈ¬ТтҙЛұҫЗэ¶ҜөзВ·СЎУГ¶АБўВціеФҙЎЈ
·ЦЖөөзВ·ҝЙТФСЎУГDҙҘ·ўЖч/JKҙҘ·ўЖчЈ¬Из74LS(HC)74Ўў74LS(HC)76Ј¬ҫщҙшЦГО»ЎўЗеБг¶ЛЈ¬ҪПТЧҝШЦЖЈ»ТІҝЙТФСЎУГјЖКэЖчЈ¬Из74LS(HC)163(ҝЙФӨЦГ)Ј¬8253(2MHZҝЙұаіМ)Ј¬82(C)54(10MHZҝЙұаіМ)ЎЈОӘБЛұгУЪөчКФәНФцјУПөНіөДИбРФЈ¬ұҫЗэ¶ҜөзВ·СЎУГҫЯУРҪПёЯЖөВКөД82C54Ј¬Льә¬УР3ёц16О»јх·ЁјЖКэЖчЈ¬ 6ЦЦ№ӨЧч·ҪКҪЎЈЖдЦР№ӨЧч·ҪКҪ2КұЈ¬ЖрЖөВК·ўЙъЖчөДЧчУГЈ¬CLK¶ЛКдИлВціеК№јЖКэЖчјх1Ј¬јЖКэЖчјхөҪ1КұНЈЦ№јЖКэЈ¬ІўК№OUT¶ЛКдіцёәВціеЈ»·ҪКҪ3Жр·ҪІЁ·ўЙъЖчЧчУГЈ¬[(N+1)/2]јЖКэНкіЙЦ®З°ОӘёЯөзЖҪЈ¬¶ФУаПВөД[(N-1)/2]јЖКэКұКдіцөНөзЖҪЎЈ
ҝШЦЖөзВ·ЦчТӘУЙөҘЖ¬»ъAT89C51ј°ВЯјӯГЕөзВ·ЧйіЙЎЈAT89C51ЧоёЯ№ӨЧчЖөВКҙп24MHzЈ¬ДЪә¬4KBөДFlashҙжҙўЖчЎЈУГУЪ82C54өДіхКј»ҜЎўҝШЦЖјЖКэВціеөДНЁ¶ПЎўјЖКэЖчөДЖф¶ҜЎўНЈЦ№ј°НкіЙПөНіЦРЖдЛьИООсЎЈ
ВцҝнөчЦЖөзВ·ЦчТӘУЙЧиИЭөзВ·ЎўөҘОИМ¬өзВ·(Из74LS/HC123)ЧйіЙЎЈёГөзВ·ЦчТӘУГУЪөчХыёчЗэ¶ҜВціеЦ®јдөДПаО»№ШПөЎЈ74LS(HC)123КЗҝЙЦШҙҘ·ўөҘОИМ¬ҙҘ·ўЖчЎЈФЪҙҘ·ўВціеөДЙПЙэСШ(ҪУB¶Л)»тПВҪөСШ(ҪУA¶Л)өДЧчУГПВЈ¬КдіцQОӘёЯөзЖҪЈ¬ҫӯ№эСУКұTwәуЈ¬КдіцQ·ө»ШөНөзЖҪЈ»Из№ыКдіцёЯөзЖҪЖЪјдЈ¬ҙҘ·ўВціеУЦөҪАҙЈ¬ФтёЯөзЖҪУЦ»бҙУҙЛҝМСУКұTwЈ¬ТтҙЛИз№ыҙҘ·ўВціеФЪёЯөзЖҪЖЪјдІ»¶ПөҪАҙЈ¬ФтёЯөзЖҪҪ«ТӘұ»ОЮПЮЖЪөДСУіЩЈ¬јҙКдіцОӘёЯөзЖҪЈ»өұНвҪУөзЧиОӘRЗТөзИЭC>1000pFКұЈ¬Tw=0.45 * R *C ЎЈ
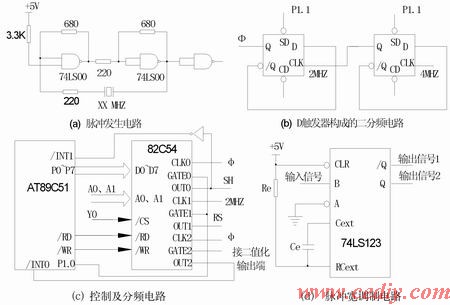
Нј1Зэ¶ҜөзВ·ФӯАнНј
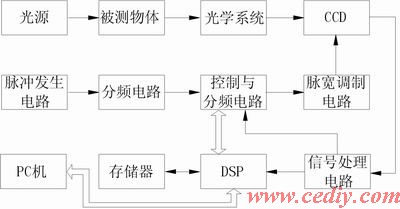
Нј2ПөНіҝтНј
ПөНіКөАэ
ПөНіЧйіЙ
ұҫПөНіУГУЪІвБҝВЭРэҪ°ЧӘ¶Ҝ№эіМЦРөДҪ°Т¶өДЖ«ХсҪЗЎЈУЙУЪВЭРэҪ°ҫЯУРёХРФЈ¬ЖдЧӘ¶Ҝ№эіМЦРІ»ҪцҙжФЪ°Ъ¶ҜЈ¬¶шЗТҙжФЪХс¶ҜЈ¬¶ФЖдЖ«°ЪҪЗөДІвБҝРиТӘФЪВЭРэҪ°ЧӘ¶Ҝ№эіМЦРІЙјҜЖдЛІМ¬өДО»ЦГЈ¬АыУГCCDөДіЙПсМШРФЈ¬Ҫ«ВЭРэҪ°ЛІМ¬өДО»ЦГРЕПўНЁ№эCCDіЙПсЈ¬№вРЕәЕЧӘ»»ОӘөзәЙРЕәЕЈ¬ҫӯ№эРЕәЕҙҰАнөзВ·Ј¬ЧӘ»ҜОӘКэЧЦРЕәЕЈ¬ҙ«КдёшCPUҙҰАнЎЈПөНіҝтНјИзНј2ЛщКҫЎЈ
ПөНіЦРөД№вФҙҝЙТФСЎУГУРФҙ№вФҙ»тЧФИ»№вЈ¬ёщҫЭІвКФПЦіЎ»·ҫіЎў°ІЧ°ҝХјдЎўМе»эөИТтЛШЧЫәПҝјВЗЈ»№вС§ПөНіҝЙёщҫЭІвКФПЦіЎөДіЯҙзТӘЗуј°КУіЎТӘЗуЈ¬ёщҫЭјёәО№вС§№«КҪјЖЛгСЎ¶ЁЈ»CCDСЎУГИХұҫ¶«ЦҘ№«ЛҫөДTCD1500CЈ¬ІвБҝҫ«¶ИәН·ЦұжВК¶јәЬёЯЈ¬ДЪУРЗэ¶ҜЖчәНІЙСщұЈіЦөзВ·Ј¬КдіцҝЙТФЦұҪУИЎіэБЛөч·щВціеіЙ·ЦөДКУЖөРЕәЕЈ¬ІўЗТЦ»Ри3В·Зэ¶ҜРЕәЕЈәSHЎўҰөЎўRSЈ»РЕәЕҙҰАнөзВ·УГУЪ¶ФCCDКдіцөДКУЖөРЕәЕҪшРРВЛІЁЎў·ЕҙуЎў¶юЦө»ҜЎўІЙСщөИҙҰАнЈ¬ұгУЪDSPҙҰАнЈ»ЦчҙҰАнЖчІЙУГКэЧЦРЕәЕҙҰАнЖчDSPЈ¬ЛьКЗТ»ЦЦёЯРФДЬөДөҘЖ¬»ъЈ¬ДЪІҝҪб№№ІЙУГёДҪшөД№ю·рҪб№№Ј¬ҫЯУР¶аМхКэҫЭЎўөШЦ·ЧЬПЯЈ¬ҝЙН¬Кұ·ГОККэҫЭәНіМРтҙжҙўЖчЈ¬Жд¶ај¶Йо¶ИБчЛ®ПЯЈ¬ҝЙТФФӨПИЧ°ФШ¶аҙп°Лј¶ЦёБоЈ¬ЦёБоЦҙРРЛЩ¶ИҝЙҙп300MIPS~10GIPS(ДЪУР¶аІўРРCPU)Ј¬Хэ№г·әУҰУГУЪІвКФЎўРЕәЕҙҰАнЎўНЁС¶өИҙуФЛЛгБҝөДБмУтЈ¬ҝЙЧчОӘРӯҙҰАнЖч(ҙуРНПөНі)Ј¬ТІҝЙТФЧчОӘЦчҙҰАнЖч(ЦРРЎРНПөНі)Ј¬ІўЗТҫЯУРSPЎўSPIЎўDMAЎўPCIЎўUSBҪУҝЪЈ¬ТІҝЙТФУлЙПО»»ъәНПВО»»ъНЁС¶ЎЈ
Зэ¶ҜКөАэ
* Зэ¶ҜКұРтТӘЗуј°КөПЦ
TCD1500CөДЗэ¶ҜКұРтИзНј3-(a)ЛщКҫЈ¬Жд№ӨЧчЖөВКЎЬ8MHzЈ¬ИЎ fF=1MHz,fRS=2MHzЈ¬TSHЎЭ(5340+64+12)/2msЎЈЖдЦРНј3-(b)КұРтУЙ Нј1-(b)КөПЦЈ¬УЙөҘЖ¬»ъЗҝЦЖЦГО»Ј¬ТФВъЧгөзәЙПтТЖО»јДҙжЖчЧӘТЖЈ»Нј3-(c)КұРтУЙ Нј1-(d)КөПЦЈ¬ЖдЦРReСЎУГҫ«ГЬҝЙөчөзЧиЈ¬Ce>1000pFЈ¬СУіЩКұјдУЙ№«КҪTw=0.45 * R *C ҫц¶ЁЈ¬ТІҝЙТФФЪКҫІЁЖчЙП№ЫІмөчЦЖЎЈ
Зэ¶ҜөзВ·№ӨЧч№эіМИзПВЈәЙПөзіхКјКұЈ¬ҝШЦЖУл·ЦЖөөзВ·ЦРөДөҘЖ¬»ъAT89C51ҝӘПаУҰЦР¶ПЈ¬¶ФёчҝШЦЖТэҪЕЙи¶ЁіхКјЧҙМ¬өзЖҪЎЈҪУЧЕ¶Ф82C54јЖКэЖчҪшРРіхКј»ҜЈ¬Йи¶Ё82C54өД№ӨЧч·ҪКҪЈә¶ЁКұЖч1әН¶ЁКұЖч2№ӨЧчУЪ·ҪКҪ3(·ҪІЁ·ўЙъЖч)Ј¬¶ЁКұЖч2№ӨЧчУЪ·ҪКҪ4(ИнјюҙҘ·ў·ҪКҪ)Ј¬ІўРҙИліхЦөЈ¬И»әу89C51өИҙэЦч»ъөДЦёБо-ҝӘКјІвБҝЈ¬ФтК№82C54ҝӘКј№ӨЧчЈ¬ІъЙъЗэ¶ҜВціеЎЈөұІъЙъТ»ёцНкХыөД»э·ЦЦЬЖЪөДЗэ¶ҜВціеәуЈ¬89C51НЈЦ№ІъЙъЗэ¶ҜВціеЈ¬өИҙэЦч»ъөДЦёБоЎЈөұCCDөЪТ»ЦЎКУЖөРЕәЕУРР§КұЈ¬ҫӯРЕәЕҙҰАнөзВ·өДТ»ПөБРҙҰАнәуЈ¬ҝЙТФФЪН¬ІҪВціеЧчУГПВ¶ФКдіцөДКУЖөРЕәЕҪшРРA/DЧӘ»»Ј¬ТІҝЙТФУГёЯЖөВціејЖКэ¶юЦө»ҜәуөДВціеҝн¶ИЈ¬НЁ№эНЁС¶Ҫ«өГөҪөДКэҫЭЛНёшЦч»ъҙҰАнЈ¬Цч»ъҪ«ІвБҝөДҪб№ыҙжИлҙжҙўЖч»тЦұҪУҙ«ёшЙПО»PC»ъЈ¬И»әуёш89C51·ўҝӘКјГьБоЈ¬Зэ¶ҜПВТ»ЦЎКУЖөРЕәЕЈ¬ИзҙЛНщёҙЦұЦБҪбКшЎЈ
* Зэ¶ҜөзВ·өДИнјюұаіМ
Вціе·ўЙъөзВ·ІъЙъ4MHzөД·ҪІЁВціеЈ¬Ҫ«ЛьНЁ№эНј1-(b)·ЦЖөөзВ·өДБҪҙО·ЦЖөЈ¬өГөҪ1MHzөД·ҪІЁВціеЎЈНј1-(b)ЛщКҫКұРтНЁ№эP1.1ҝШЦЖЈ¬ҙУ¶шІъЙъfВціеЈ»¶ЁКұЖч0јЖКэВціеИЎЧФІъЙъfВціеөДөЪТ»ёц·ЦЖөЖчөДКдіц(2MHz)Ј¬ ЖдјЖКэіхКјЦө>(5340+64+12)msЈ¬ҙУ¶шІъЙъSHВціе;НЁ№э°СfЧчОӘ¶ЁКұЖч1өДјЖКэВціе, јЖКэіхКјЦө=2,ФЩҪ«OUT1өДКдіцҪУөҪВцҝнөчЦЖөзВ·јҙҝЙөГөҪRSВціеЎЈЦБҙЛЈ¬CCD№ӨЧчЛщРиТӘөДЗэ¶ҜВціеИ«ІҝөГөҪЎЈ
89C51ІъЙъЗэ¶ҜВціеөДІҝ·ЦіМРтјыұҫҝҜНшХҫ(www.eaw.com.cn)
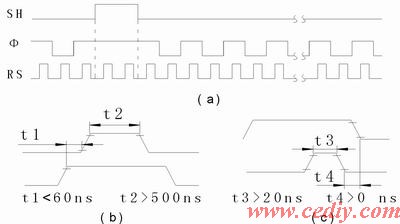
Нј3 TCD1500CЗэ¶ҜВціеКұРт
ҪбУп
ёГЗэ¶ҜөзВ·ЧЫәПБЛЦұҪУКэЧЦөзВ·Зэ¶Ҝ·Ҫ·ЁҫЯУРҪПёЯөДЗэ¶ҜЖөВКәНөҘЖ¬»ъҝЪЗэ¶Ҝ·Ҫ·ЁБй»оРФМШөгЈ¬»№ҫЯУРУІјюөзВ·јтөҘЎўіЙұҫөНЎўИнјюұаіМБй»оЎўҝЙЦұҪУ·ҪұгөДКЬЦчҙҰАнЖчҝШЦЖөИМШөгЈ¬¶шЗТФЪКөјКК№УГЦРОИ¶ЁҝЙ*Ј¬ҫЯУРТ»¶ЁөДКөУГјЫЦөЎЈ |